数据结构——图
数据结构——图
图的定义
图 (graph) 是一个二元组 $G = (V(G), E(G))$ 。
其中 $V(G)$ 是非空集,称为 **点集 (vertex set)**,对于 $V$ 中的每个元素,我们称其为 顶点 (vertex) 或 **节点 (node)**,简称 点
$E(G)$ 为 $V(G)$ 各结点之间边的集合,称为 边集 (edge set)
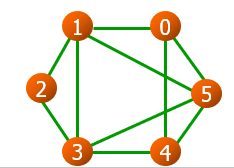
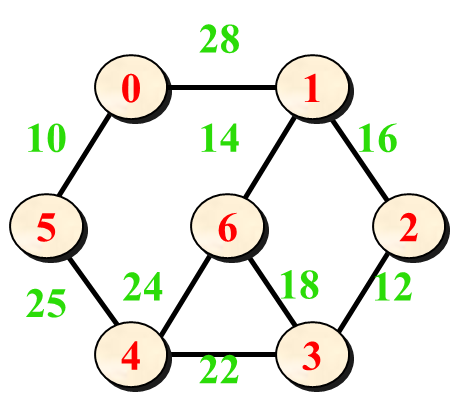
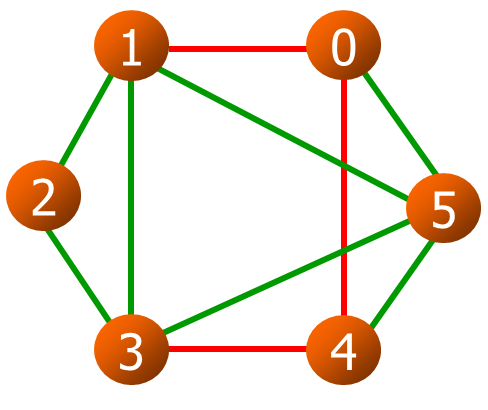
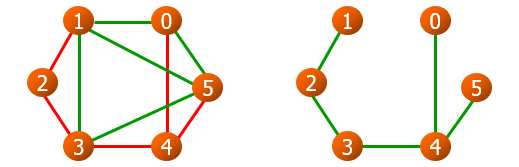
无向图(Undigraph)
用 $(x, y)$ 表示两个顶点之间的一条边(edge)
G={V,E},V={0,1,2,3,4,5},E={(0,1), (0,4), (0,5), (1,2), (1,3), (1,5), (2,3), (3,4), (3,5), (4,5)}
邻接点:如果 $(x, y) \in E$ ,称x,y互为邻接点,即x,y相邻接
依附:边 $(x, y)$ 依附于顶点x,y
相关联:边$(x, y)$与x,y相关联
顶点的度:n和顶点相关联的边的数目,记为TD(x)
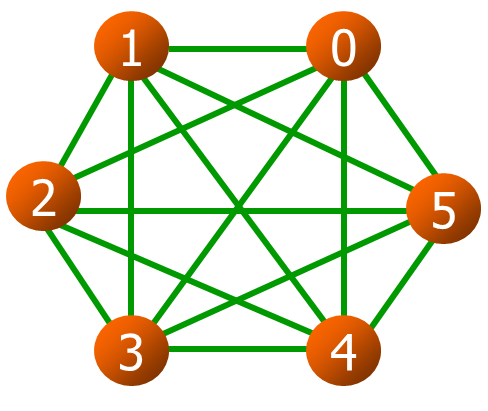
无向图 (完全图)
如果无向图有 $n(n-1)/2$ 条边,则称为无向完全图
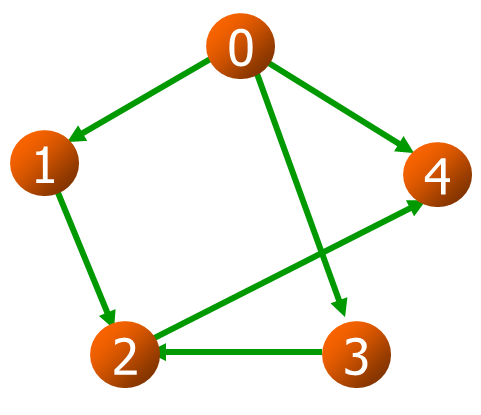
有向图(Digraph)
用 $<x,y>$ 表示从x到y的一条弧(Arc),且称x为弧尾,y为弧头
**G={V,E},V={0,1,2,3,4},E={<0,1>,<0,3>,<0,4>,<1,2>,<2,4>,<3,2> } **
- 邻接:如果 $<x,y> \in E$ ,称x邻接到y,或y邻接自x
- 相关联:弧 $<x,y>$ 与x,y相关联
- 入度:以顶点为头的弧的数目,记为ID(x)
- 出度:以顶点为尾的弧的数目,记为OD(x)
- 度:TD(x)=ID(x)+OD(x)
有向完全图
如果有向图有n(n-1)条边,则称为有向完全图
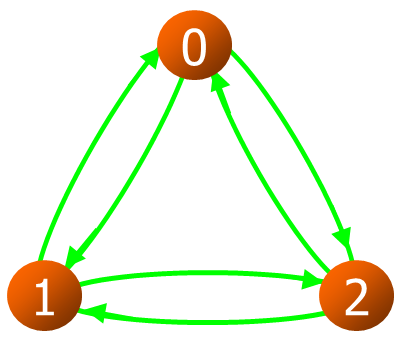
任意两个顶点之间都存在方向相反的两条弧(每个顶点和其他n-1个顶点之间有一条连线),即$Pn^2$
网(Network)
- 网:带权的图称为网
- 权:与图的边或弧相关的数
无向网的应用:最小生成树
有向网的应用:最短路径,关键路径
路径(Path)
路径:是一个从顶点x到顶点y的顶点序列(x, vi1, vi2,…, vim, y)
其中,(x,vi1),…(vij-1,vij),…(vim,y)皆属于E
1到3有路径(1,0,4,3)
回路
- 回路或环:路径的开始顶点与最后一个顶点相同,即路径中 $(x, v_{i1}, v_{i2},…, v_{im}, y)$ ,x=y
- 简单路径:路径的顶点序列中,顶点不重复出现
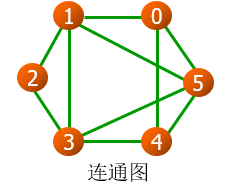
连通
- 连通:如果顶点x到y有路径,称x和y是连通的
- 连通图:图中所有顶点都连通
子图
设有两个图 $G=(V, E)$ 和 $G’=(V’, E’)$。若 $V’ \subseteq V$ 且 $E’ \subseteq E$, 称图G’是图G的子图
生成树
一个连通图的生成树是一个极小连通子图,它含有图中全部n个顶点,但只有足以构成一棵树的n-1条边
生成树是具有图中全部顶点的一个极小连通子图。一棵含有n个顶点的生成树必然含有n-1条边。
图的储存
邻接矩阵
利用一个二维数组 bool mp [N] [N],mp [ i ] [ j ] = 1 代表E中有< i , j >这条边,而=0时则说明无这条边
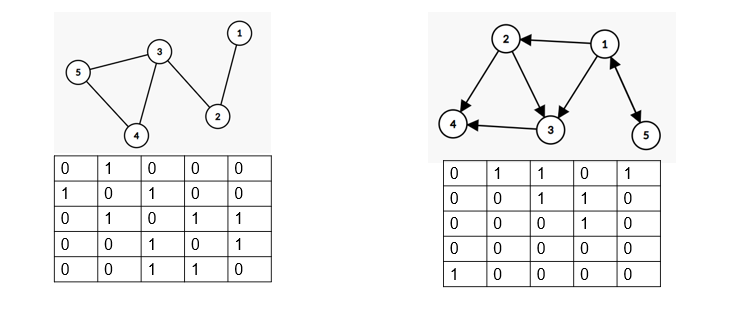
若图带权则把1换成对应的权值
无向图的邻接矩阵是对称的
A [i] [j] 可确定顶点i和j之间是否有边相连
其第i行1的个数或第i列1的个数,等于顶点i的度TD(i)
特别:完全图的邻接矩阵中,对角元素为0,其余全1。
有向图的邻接矩阵可能是不对称的
其第i行1的个数等于顶点i的出度OD(i),第j列1的个数等于顶点j的入度ID(j)
顶点的度=第i行元素之和+第i列元素之和
代码样例:
1 | const int MAXN = 10001; |
复杂度
查询是否存在某条边:$O(1)$ 。
遍历一个点的所有出边:$O(n)$ 。
遍历整张图:$O(n^{2})$ 。
空间复杂度:$O(n^{2})$ 。
应用
邻接矩阵只适用于没有重边(或重边可以忽略)的情况。
其最显著的优点是可以 查询一条边是否存在。
由于邻接矩阵在稀疏图上效率很低(尤其是在点数较多的图上,空间无法承受),所以一般只会在稠密图上使用邻接矩阵。
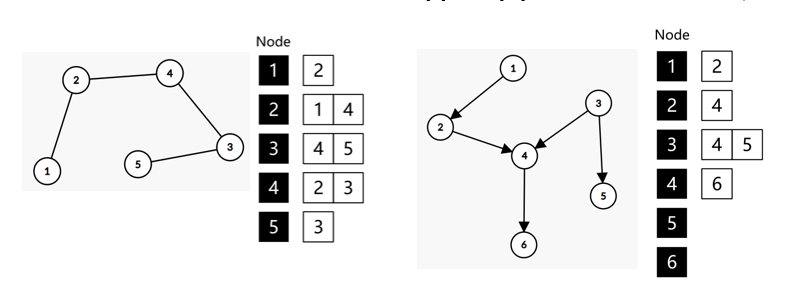
邻接表
利用vector的可变长空间,我们建立vector<int>Node[N],Node[ u ]内的任一值 v 代表有一条边 $< u , v >$
代码样例:
1 | vector<vector<int> > adj; |
复杂度
查询是否存在 到 的边:$O(d + (u))$ 。
遍历点 的所有出边:$O(d + (u))$ 。
遍历整张图:$O(m + n)$ 。
空间复杂度:$O(m)$ 。
应用
存各种图都很适合,除非有特殊需求(如需要快速查询一条边是否存在,且点数较少,可以使用邻接矩阵)。
尤其适用于需要对一个点的所有出边进行排序的场合。
图的遍历
- 从图的某一顶点开始,访遍图中其余顶点,且使每一个顶点仅被访问一次
- 图的遍历主要应用于无向图
- 遍历实质:找每个顶点的邻接点的过程。
深度优先搜索
DFS 最显著的特征在于其 递归调用自身。同时与 BFS 类似,DFS 会对其访问过的点打上访问标记,在遍历图时跳过已打过标记的点,以确保 每个点仅访问一次。符合以上两条规则的函数,便是广义上的 DFS。
邻接矩阵:
1 | void dfs(int pos) |
邻接表:
1 | vector< vector<int> > graph[N]; |
广度优先搜索
BFS 全称是 Breadth First Search,中文名是宽度优先搜索,也叫广度优先搜索。
是图上最基础、最重要的搜索算法之一。
所谓宽度优先。就是每次都尝试访问同一层的节点。 如果同一层都访问完了,再访问下一层。
这样做的结果是,BFS 算法找到的路径是从起点开始的 最短 合法路径。换言之,这条路径所包含的边数最小。
在 BFS 结束时,每个节点都是通过从起点到该点的最短路径访问的。
邻接矩阵:
1 | void bfs(int u) |
邻接表:
1 | vextor<int> graph[N] |
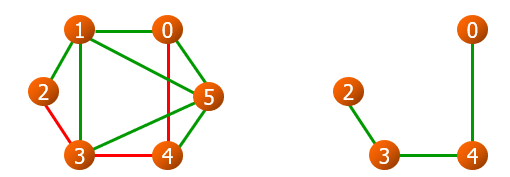
图的连通性问题
无向图的连通
- 非连通图的极大连通子图叫做连通分量
- 若从无向图的每一个连通分量中的一个顶点出发进行DFS或BFS遍历,可求得无向图的所有连通分量的生成树(DFS或BFS生成树)
- 所有连通分量的生成树组成了非连通图的生成森林
最小生成树
- 如果无向图中,边上有权值,则称该无向图为无向网
- 如果无向网中的每个顶点都相通,称为连通网
- 最小生成树(Minimum Cost Spanning Tree)是代价最小的连通网的生成树,即该生成树上的边的权值和最小
要求:
- 必须使用且仅使用连通网中的n-1条边来联结网络中的n个顶点;
- 不能使用产生回路的边;
- 各边上的权值的总和达到最小。
Prim算法和Kruskal算法都可以看成是应用贪心算法设计策略的例子。
Prim算法
算法思想:从某一点出发,挑选一条连接这个点的权值最小的边,将这条边和连着的那个点加入最小生成树;
然后继续挑选一条连接目前最小生成树的权值最小的边,将这条边和连着的那个点加入最小生成树。
代码样例:
1 | const int MAXN = 5050; |
Kruskal算法
算法思想:将所有边从小到大排序,然后依次挑选这些边,只要一条边连接的两个点不连通,就将这条边加入最小生成树。
具体来说,维护一个森林,查询两个结点是否在同一棵树中,连接两棵树。
抽象一点地说,维护一堆 集合,查询两个元素是否属于同一集合,合并两个集合。
其中,查询两点是否连通和连接两点可以使用并查集维护。
1 | /* |
克鲁斯卡尔的时间复杂度
它主要分为三个部分,首先我们要对 n个节点进行初始化,所以第一部分的复杂度为O(n) ;然后,我们要对所有边 e 进行排序,用基于比较的排序算法,我们最快能够达到 eloge 的复杂度;最后,我们判断两个节点是否属于一个集合,由于树的高度和节点数 呈现一个近似对数关系,而我们要对 n-1 条边进行判断,因此这一部分的时间复杂度就为nlogn 。由于在比较稠密的图中,边的个数大于节点的个数,所以总的复杂度我们取较大的eloge 。